计算机图形学实验报告 实验1:平面三角形点定位算法 1.实验内容
ps:报告图片为对应程序用OpenCV绘制。
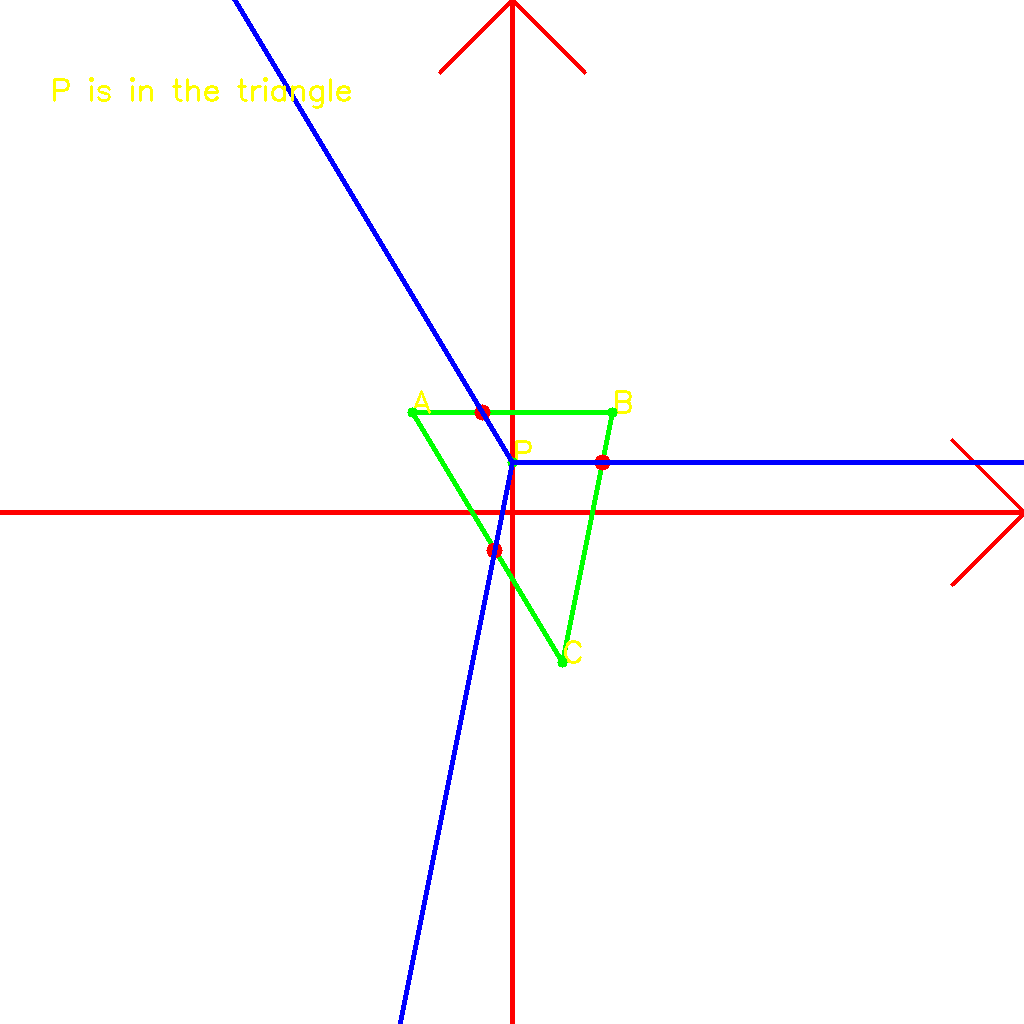
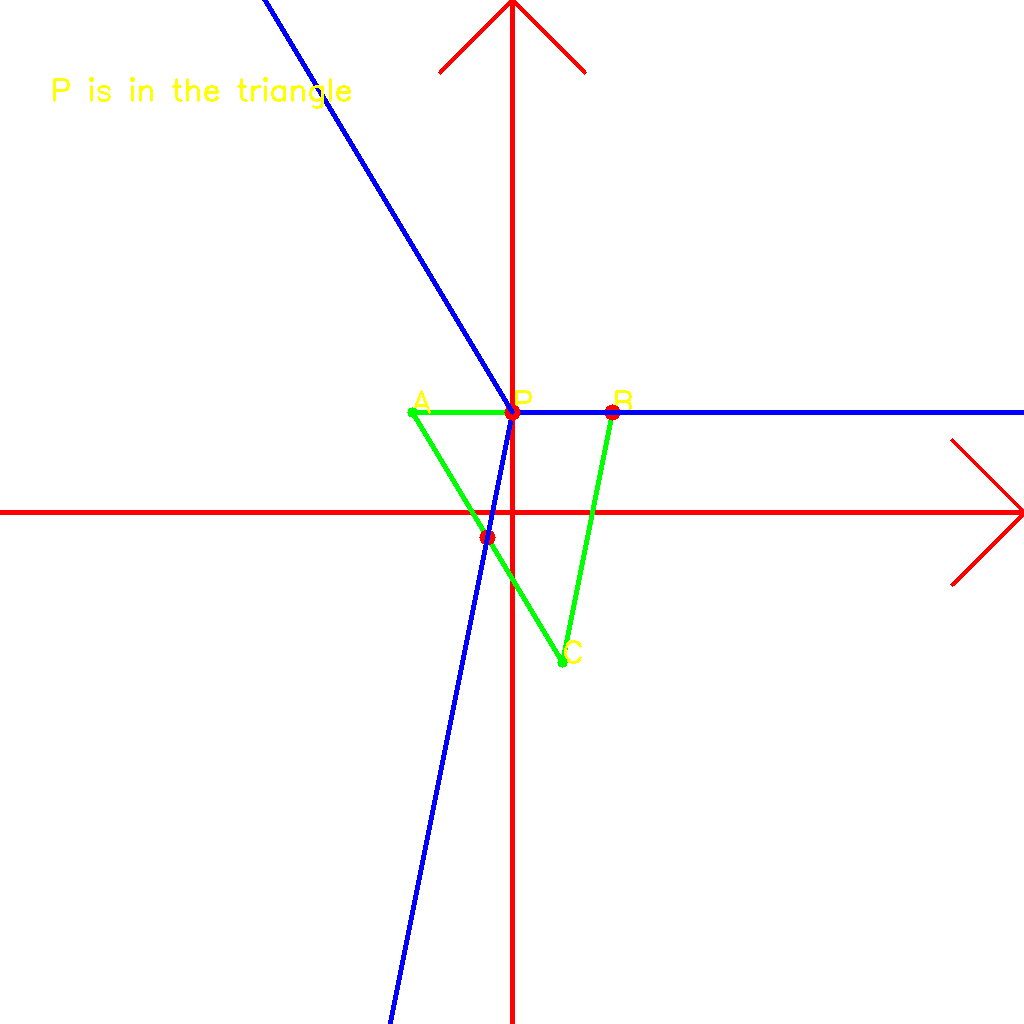
(1)方法1:射线求交法(交点个数判断) 基本原理:
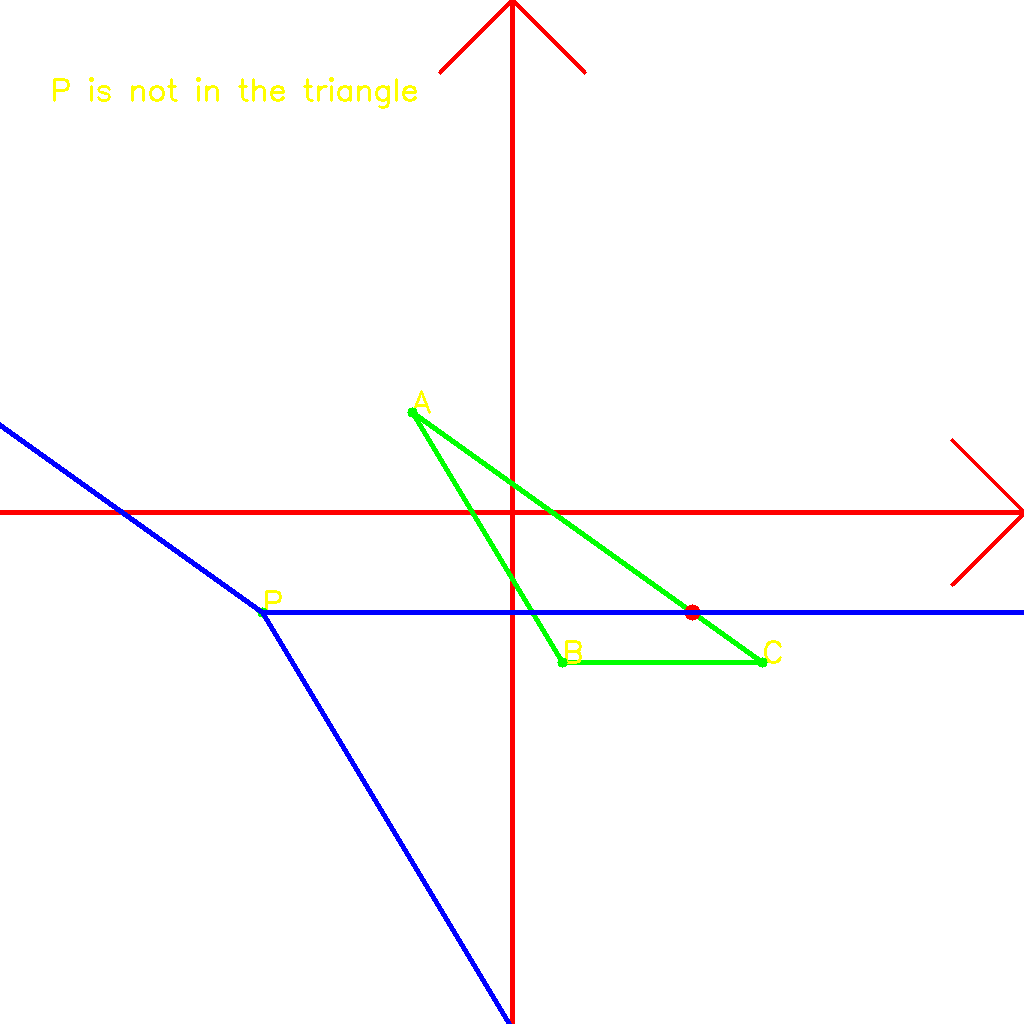
而当P点在三角形外时,如下图,将得到少于3个交点
另外,当P在三角形边上是,按在三角形内来算:
计算方法
通过给定的A,B,C和P点坐标,先编写一函数判断射线和线段是否相交并求交点:
根据
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 bool isCross (Vector2f P,Vector2f d,Vector2f A,Vector2f B,double &t) Vector2f PA = A - P; Vector2f BA = A - B; if (d[0 ]*BA[1 ]-d[1 ]*BA[0 ]!=0 ){ t=(PA[0 ]*BA[1 ]-PA[1 ]*BA[0 ])/(d[0 ]*BA[1 ]-d[1 ]*BA[0 ]); double u=(d[0 ]*PA[1 ]-d[1 ]*PA[0 ])/(d[0 ]*BA[1 ]-d[1 ]*BA[0 ]); if (t>=0 &&u>=0 &&u<=1 ){ return true ; } else { return false ; } } return true ; }
运行测试: 通过标准输入选取点的坐标,输出保存在output.png文件
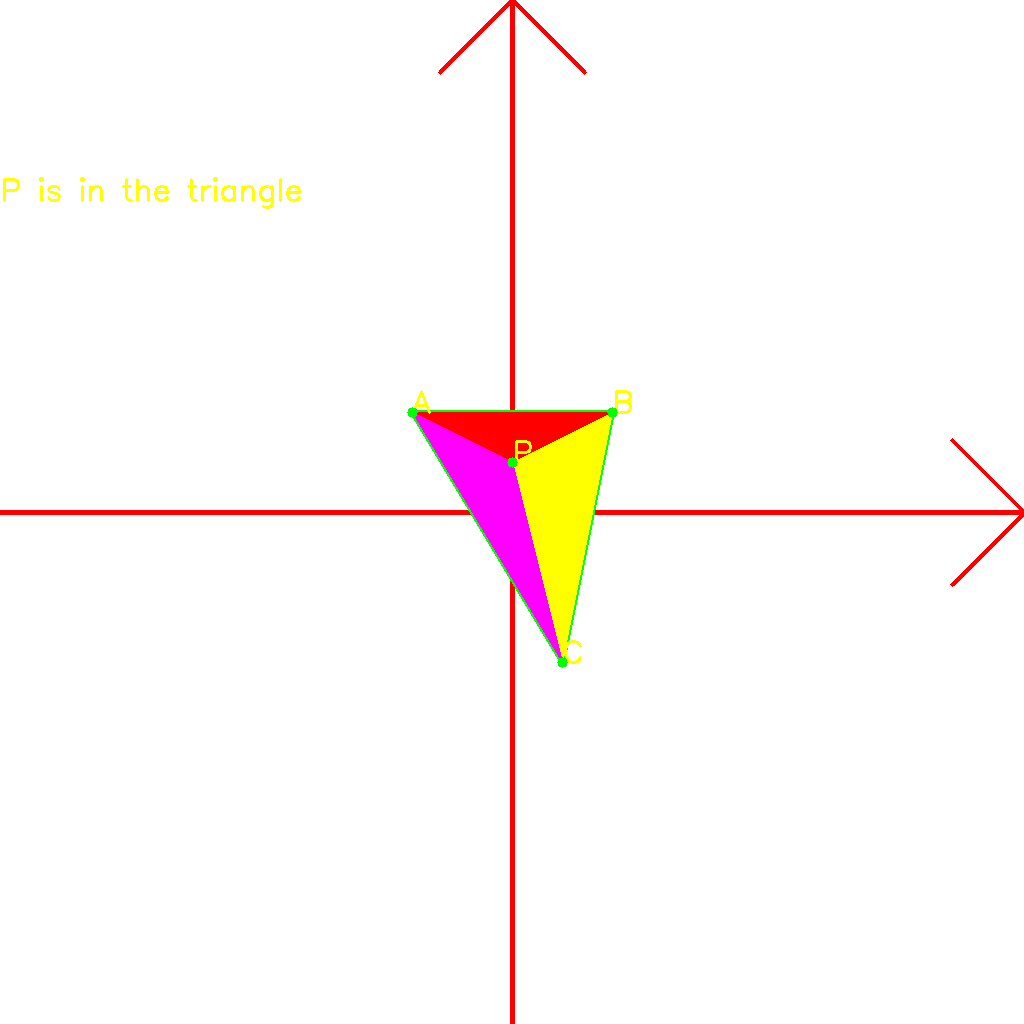
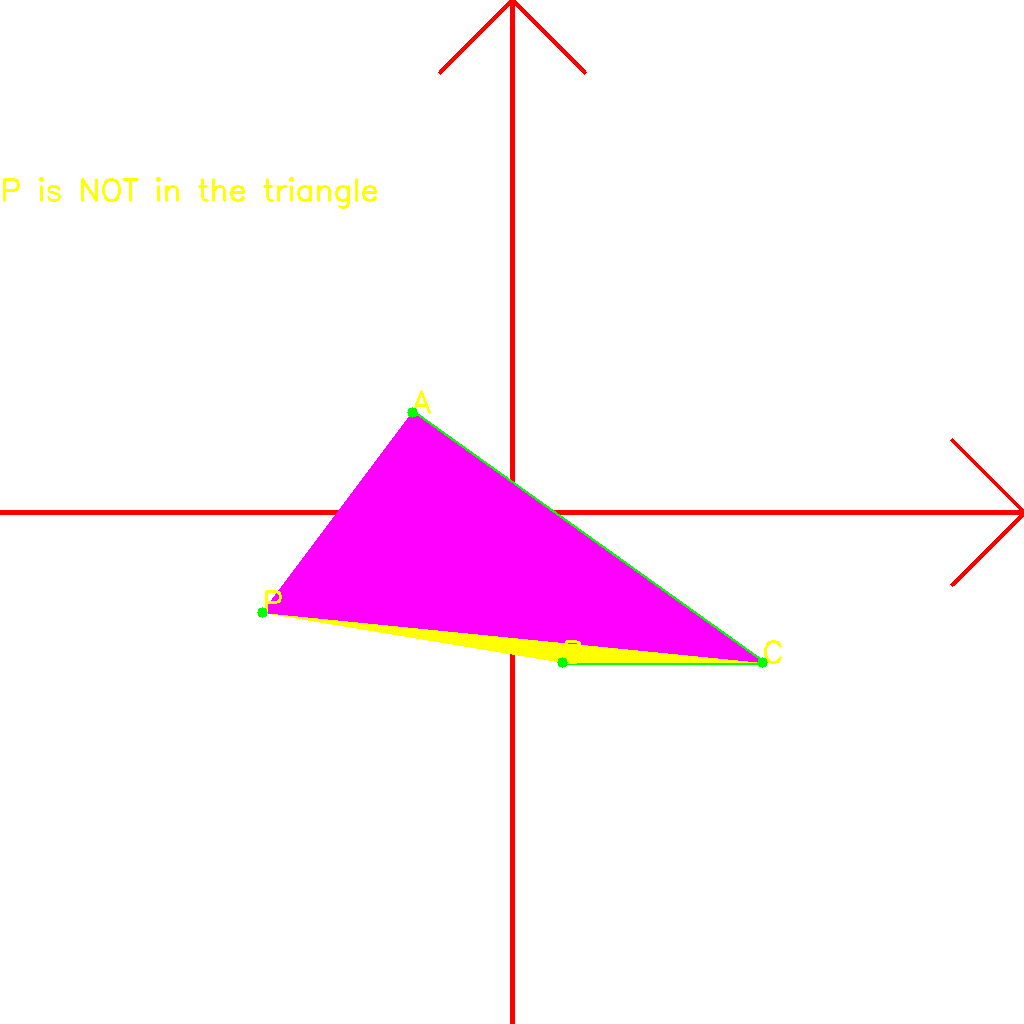
(2)方法2:面积法 基本原理: 分别计算三角形ABC、PAB、PBC、PCA的面积,若后三者面积相加等于S_ABC,则P在三角形内;
否则(大于S_ABC)则在三角形外。
计算方法: 对于三角形ABC,其面积可用任两边向量叉乘取模再除2 得到
关键代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 double S_ABC = 0.5 * AB.cross (AC).norm ();double S_PAB = 0.5 * PA.cross (PB).norm ();double S_PBC = 0.5 * PB.cross (PC).norm ();double S_PCA = 0.5 * PC.cross (PA).norm ();if (!(abs (S_PAB) < 1e-6 || abs (S_PBC) < 1e-6 || abs (S_PCA) < 1e-6 )){ if (abs (S_PAB + S_PBC + S_PCA - S_ABC) < 1e-6 ){ text = "P is in the triangle" ; } else { text = "P is NOT in the triangle" ; } putText (img, text, Point (0 , 200 ), FONT_HERSHEY_SIMPLEX, 1 , Scalar (0 , 255 , 255 , 255 ), 2 ); }
运行测试: 同方法1.
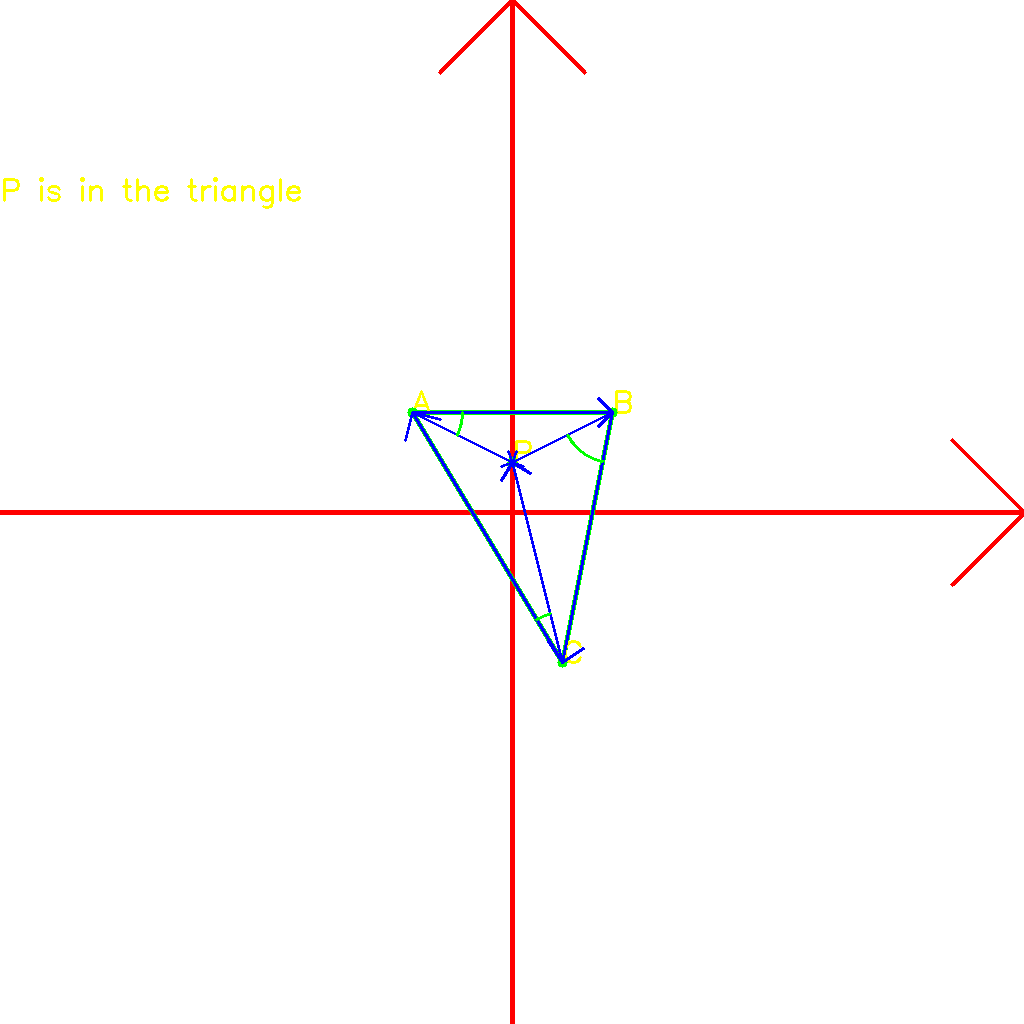
(3)方法3:同侧法 基本原理: 若P在ABC内,则AP、BP、CP必定分别在AB、BC、CA同侧;
否则在ABC外。
计算方法: 判断向量AP在AB哪一侧可以用$\vec{AB} \times \vec{AP}$的符号判断,若为正,根据右手定则,AP在AB左侧,否则在右侧。
1 2 3 4 5 6 if (AB.cross (AP).dot (BC.cross (AP))> 0 && BC.cross (BP).dot (CA.cross (BP)) > 0 && CA.cross (CP).dot (AB.cross (CP)) > 0 ){ text = "P is in the triangle" ; } else { text = "P is NOT in the triangle" ; }
绘图方法: 此方法绘图在于绘制一个角度弧来展示同侧方向,利用OpenCV库函数ellipse:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 void draw_angle (Mat img, Point2d p0, Point2d p1, Point2d p2, double radius) double angle1 = atan2 (-(p1.y - p0.y), (p1.x - p0.x)) * 180 / CV_PI; double angle2 = atan2 (-(p2.y - p0.y), (p2.x - p0.x)) * 180 / CV_PI; double angle = angle1 <= 0 ? -angle1 : 360 - angle1; double end_angle = (angle2 < angle1) ? (angle1 - angle2) : (360 - (angle2 - angle1)); if (end_angle > 180 ) ellipse (img, p0, Size (radius, radius),angle, 0 , end_angle-360 , Scalar (0 ,255 ,0 ,255 ), 2 ); else ellipse (img, p0, Size (radius, radius), angle, 0 , end_angle, Scalar (0 ,255 ,0 ,255 ), 2 ); }
运行测试: 同方法1.
-17104745668432.png)
